近日,南方科技大学机械与能源工程系、机器人研究院副教授王宏强提出一种应用于静电吸附的自清除机制。相关研究成果发表于机器人领域顶级期刊《软体机器人》。
静电吸附作为一种极具发展前景的吸附技术,已经被广泛的应用于软体机器人、飞行器、可穿戴设备,以及航空航天领域。静电吸附片通常是由一层电极层和一层介电层组成。静电吸附装置是通过施加高电压使吸附片和导电片产生异种电荷从而实现强力吸附作用。然而,由于介电层内部缺陷导致的静电击穿引发装置短路在静电吸附中是几乎不可避免的,一旦击穿,整个装置将失效。
研究示意图 南科大供图
为解决静电吸附失效问题,王宏强课题组提出了一种新的自清除机制,通过利用足够薄的导电层(例如,不超过7微米的铜层),可以在静电击穿后自动清除断点周围的导体完成自清除,从而恢复装置功能。该方法易于操作且兼容各种材料和制造过程。测试表明,该机制可将最大可用电压提高260%,最大静电吸附力提高276%。此外,该方法还可成功修复静电击穿的物理损伤,并使其稳定可靠地工作,为静电吸附在高性能和广泛应用方面提供了新的途径。
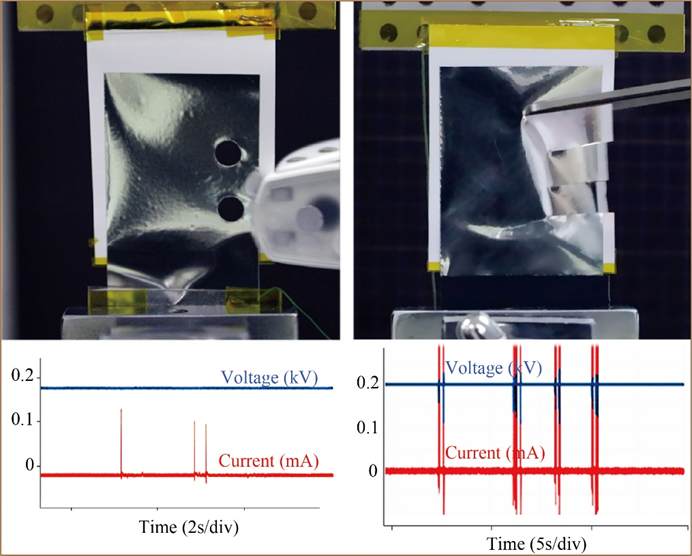
图说:自清除机制使静电吸附设备克服打孔、剪裁操作 科研团队供图
该研究团队通过实验发现自清除过程可以提高静电吸附装置的耐受电压,进而使其输出力提高276%。而静电击穿所产生的焦耳热,是自清除过程中蒸发电极以及清除介电层残余的能量来源。因此,只有当电极层足够薄时(例如,当铜电极厚度小于7微米),自清除过程才可以成功。基于不同厚度的导电层,研究者提出了四种不同的自清除机制。当自清除成功时,静电吸附装置的工作电压会出现短暂的降低,之后迅速恢复(150毫秒)至正常操作电压。通过多次自清除过程,吸附片的击穿电压最大可以提升至原先的2.6倍。当电极厚度不小于5微米时,自清除后的清除位点并不会影响静电吸附力的大小。并且,在连续击穿测试中,静电吸附设备在65分钟内,耐受了173次电击穿。
而且,为了展现自清除机制在实际应用中的稳定性和可靠性,研究人员在对静电吸附装置施加打孔、穿刺,剪裁等物理破坏后,静电吸附装置的自清除过程仍迅速完成,且没有对吸附装置的正常操作造成影响。研究人员还发现静电离合器在吸附200克重物时发生多次自清除现象,而自清除过程几乎没有影响吸附力的大小。此外,研究人员还展示了自清除机制在静电抓手中的应用,在抓取物体时提高操作电压,自清除过程使抓手克服静电击穿,成功完成抓取-放置操作。
通过这些展示,研究人员验证了自清除机制在在静电吸附领域的可靠性和广泛应用,该技术为其它静电领域,如介电弹性驱动和压电驱动,提出新的设计思路。(来源:中国科学报 刁雯蕙)
相关论文信息:https://doi.org/10.1089/soro.2022.0132