软体机器人因自身的可变形性在许多场景下具备传统刚性机器人不可比拟的优势,例如医疗复健、养老、灾难救援等等。然而,软体机器人也因自身结构材料较软,和硬质高密度能量源不兼容,极大的限制了软体机器人的应用潜力。
在自然界中,动植物们经过亿万年的进化,自身发展出的结构和功能与环境相适应。一种习居于水溏、小溪边的昆虫就具备一种十分有趣的运动方法。当他们不小心跌落在水面上时,可以通过在尾部释放一种化学物质,在水面产生出表面能梯度,利用该表面能梯度获得前进的动能,完成重新着陆。这样一种急救方法,被称为马兰戈尼推进(Marangoni Propulsion)。
在这篇由华中科技大学吴志刚教授课题组和丁汉教授课题组发表于《国家科学评论》(National Science Review,NSR)的文章中,作者将马兰戈尼推进的原理应用于软体机器人驱动,展示了一种能够灵活运动在液体界面上的无线全软体机器人。
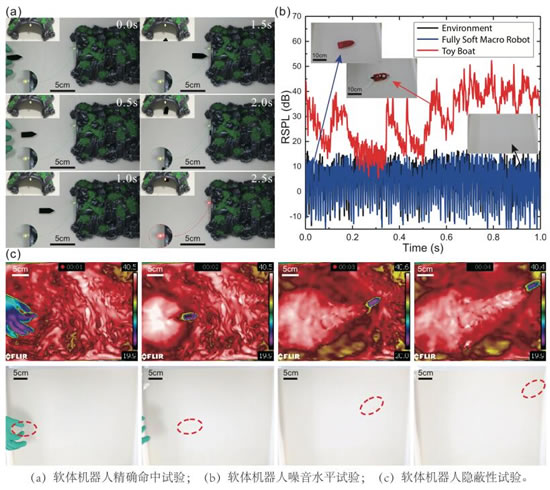
该软体机器人由全软材料构成,不含任何机械传动部件,因此噪音水平较低,而且驱动过程无明显热效应,不存在热疲劳和机械磨损的问题。另外由于驱动力来源于液体环境的能量梯度,该软体机器人只需携带一定的驱动材料即可,不存在能量源和机器人本体软材料之间的集成问题。设计者可以将重心放在如何实现应用场景所需的功能,无需考虑驱动的问题,以充分发挥软体机器人的潜力。该软体机器人结构简单,能够在水面上以5.5个身长每秒的高速灵活运动,这一数值接近常见的鱼类(例如金鱼,6.36),是现阶段同类无线软体机器鱼的7倍多。
该研究以 “Bioinspired untethered fully soft robots in liquid actuated by induced energy gradients” 为题发表于NSR。华中科技大学的吴志刚教授和丁汉教授为论文的共同通讯作者。该工作受到中国国家自然科学基金(No. U1613204,No. 91648000)的支持。(来源:科学网)
相关论文信息:https://doi.org/10.1093/nsr/nwz083







