导读
近日,来自德国卡尔斯鲁厄理工学院Moritz Kreysing等人展示了激光诱导局部流场的迭代可用于多个微颗粒的相对定位。研究人员表明,通过低于热扩散极限的温度刺激复用可以加速微粒的精确操控,由此产生的流场具有丰富的拓扑结构和数学可预测性。它们代表了前所未有的微流体控制能力,并通过驱动具有多达30个自由度的微型机器人得到了体现。该文章被发表在《Light: Science & Applications》期刊上,题为“Opto-fluidically multiplexed assembly and micro-robotics”,Elena Erben是文章的第一作者,Moritz Kreysing是通讯作者。
背景介绍
精确操纵溶液中的微观粒子作为一个重要的研究领域,可以应用于 、生物医学、纳米科学、工程学和物理学研究。当代的微操作方法包括光学镊子、磁性机器人、光致动微型推杆等。这些技术通常要求微粒或者辅助探针具有特定的材料特性,必须使用高强度激光照射,或缺乏复用和操纵多个微粒的光学控制能力。
除了这些成熟的微操作方法,在多泵驱动的微流体室中进行微流体操作被认为是处理微米级粒子和组装复杂结构的一种解决方案。虽然这种方案理论上可行,但其方法的复杂性与颗粒数量成反比。泵驱动腔室中的流场物理特性严重限制了微流体技术处理物理的潜力,从而使得开发自由度可以与当代宏观机器人媲美的液压驱动微型机器人变得遥不可及。
德累斯顿马克思-普朗克分子细胞生物学和遗传学研究所的M. Kreysing等人提出了另一种光流体的方法,以实现对粒子的精确微操作。这种方法克服了以往的局限性,在从单个粒子操纵过渡到多个粒子操纵时不需要进行任何硬件改动。在多路复用时显示出意想不到的速度提升,并有望实现具有大量自由度的可分析的高清机器人技术。
创新研究
利用光学产生的热粘性流动,这种流动可用于移动和限制单个胶体粒子。简而言之,这些层流源于热膨胀和粘度随温度变化之间复杂的相互作用,使其成为二阶物理效应。通过使用标准声光调制器和高清荧光显微镜(图1b),以低kHz的重复频率对弱加热单模红外激光束(图1a)进行定向空间扫描,可以在流体的任何位置用光学方法诱导这些定向流动。分析表明,在二维约束条件下,诱导流场在激光扫描路径附近强烈局部化,在远场以距离平方反比的速度衰减。研究人员利用扩展的闭环反馈方案(图1c)对这些激光扫描和成像光学器件进行了补充,以随着时间的推移逐步减少粒子定位误差。由于光学诱导流场的局部特性,该方法可以很容易地定位更多颗粒,从而组装出微米尺度的准静态结构,超越了泵驱动腔室可处理颗粒数量的实际和理论限制。
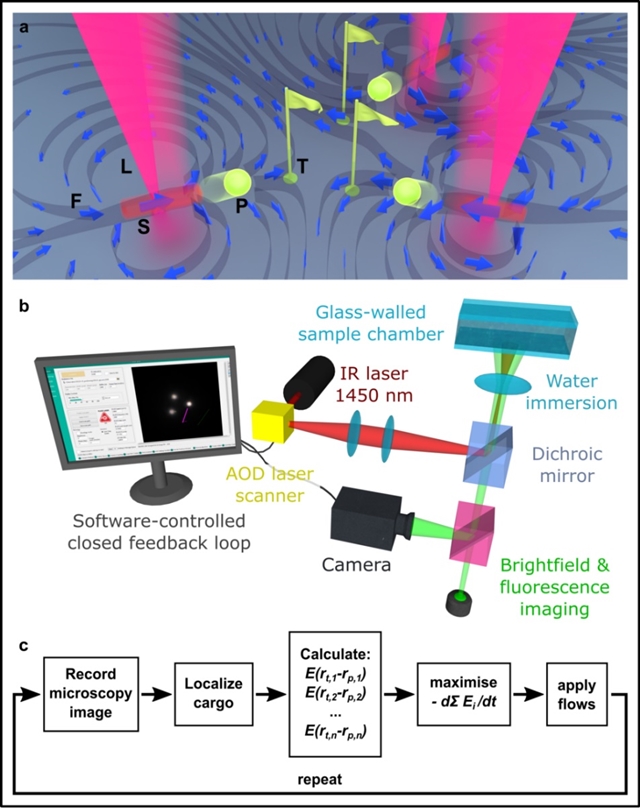
图1 通过反馈控制多路复用热粘性流实现多粒子定位的概念
目前,最先进的机器人可实现众多自由度、动态运动和高精度。事实上,仿人机器人已经发展到可以展示复杂运动和复制情绪化肢体语言的水平。研究人员提出的方法可以实现大量粒子的相对定位,由于这些粒子无需固定在其相对位置上以减少自由度数量,因此粒子在任何时候都能保持移动。
在微观机器人中,相互靠近的粒子可能会出现明显但可解决的串扰,然而从粒子位置与流速最高区域相匹配的流场过渡到稍有偏移的流场,从而将高速流动与明显的速度梯度结合在一起时,会产生额外的灵活性。从仿人机器人研究和运动模式感知研究中汲取灵感,研究人员最终制作出了步行仿人机器人动画,其重量约为人体尺度液压驱动机器人的10-15倍,方法是使用数百个多路复用且不断变化的光学和情境生成流场来驱动各个“身体部位”。这些机器人具有多达30多个自由度,它们的动力学定义非常明确,可以通过行走时显示的肢体语言可靠地传达性别、快乐甚至紧张等人类属性。(来源:LightScienceApplications微信公众号)
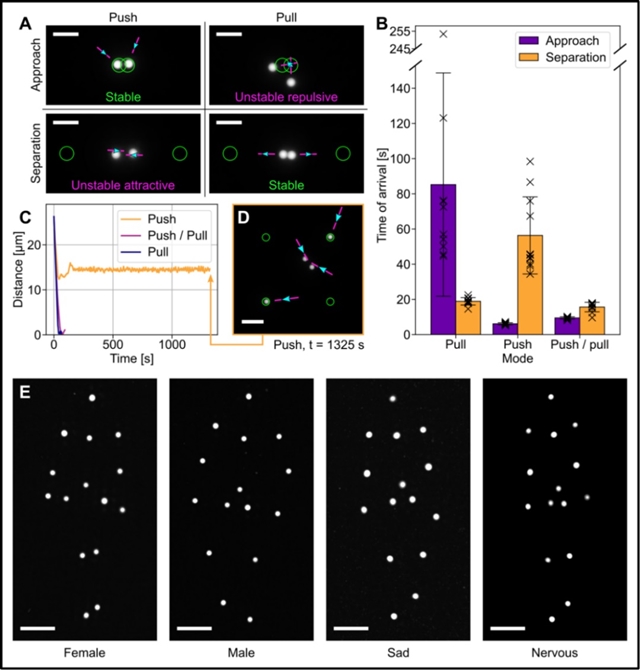
图2 能够表达情感肢体语言的仿人机器人,采用情境感知动态排列策略,最大限度地减少流体动力耦合
相关论文信息:https://doi.org/10.1038/s41377-024-01406-4
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。








