|
|
|
|
|
FME | 前沿研究:面向复杂装备数字孪生的多级融合建模方法 |
|
|
论文标题:M-LFM: a multi-level fusion modeling method for shape−performance integrated digital twin of complex structure(面向复杂装备数字孪生的多级融合建模方法)
期刊: Frontiers of Mechanical Engineering
作者:Xiwang HE(何西旺), Xiaonan LAI(来孝楠), Liangliang YANG(杨亮亮), Fan ZHANG(张凡), Dongcai ZHOU(周东才), Xueguan SONG(宋学官), Wei SUN(孙伟)
发表时间:23 Nov 2022
DOI:10.1007/s11465-022-0708-0
微信链接:点击此处阅读微信文章
面向复杂装备数字孪生的多级融合建模方法
M-LFM: a multi-level fusion modeling method for shape−performance integrated digital twin of complex structure
01 作者列表
Xiwang HE(何西旺), Xiaonan LAI(来孝楠), Liangliang YANG(杨亮亮), Fan ZHANG(张凡), Dongcai ZHOU(周东才), Xueguan SONG(宋学官), Wei SUN(孙伟)
02 关键词
shape-performance integrated digital twin (SPI-DT), multi-level fusion modeling (M-LFM), surrogate model, telescopic boom crane, data fusion
形性一体化数字孪生,多级融合建模,代理模型,伸缩臂起重机,数据融合
原文链接
https://journal.hep.com.cn/fme/EN/10.1007/s11465-022-0708-0
01 文章简介
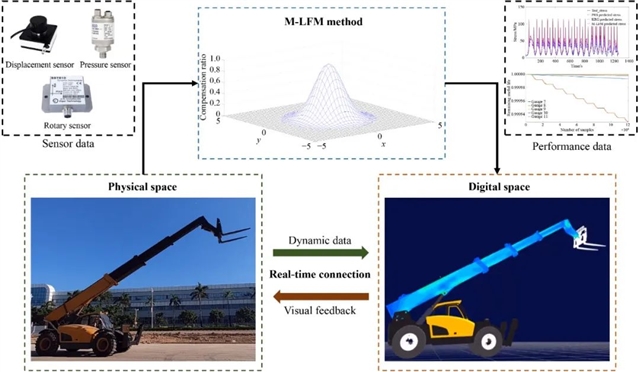
自2013年,由物联网、大数据、机器人、人工智能等技术驱动的第四次工业革命席卷全球,这场革命促进了数据分析、云计算、人工智能等新兴产业的快速发展。在这种背景下,由于数字孪生可以实现结构性能的动态映射,使其在工程结构领域获得了广泛的关注。然而,由于复杂结构的应力变化复杂,现有的建模方法无法满足结构易损区域的预测精度,如何提高大型复杂机械结构关键位置的应力预测精度是实现结构寿命监测的关键问题。在此背景下,本文开发了一种多级融合建模方法来实现动态系统的实时性能预测,该方法结合了不同代理模型的优点,并将仿真数据和实测数据结合起来,可以提高动态应力集中的预测精度。通过将多级融合建模型方法集成至形性一体化数字孪生框架中,框架包括模拟数据、测量数据、多级融合建模、可视化技术和疲劳分析。然后,以伸缩臂起重机为例,验证了所提出的建模方法在应力预测精度和预测效率上都具备较好的性能。结果表明,与多项式响应面法和克里金法相比,多级融合建模方法在应力预测的计算效率和计算精度上都有更好的性能表现。因此,所提出的框架可以利用数字孪生在动态系统中的优势实现结构的损伤监测和安全评估,进而推动数字孪生在工业领域的发展。
02 文章亮点
针对复杂装备数字孪生的实时性和高精度需求,本文提出一种多级融合建模方法实现了伸缩臂起重机的疲劳寿命预测,体现了以下亮点:
1.提出了一种多级融合建模方法,利用实测数据和仿真数据建立动态应力集中区域的区域补偿模型,可以更准确地描述复杂结构的力学行为。
2.将提出的多级融合建模方法集成到形性一体化数字孪生框架中,实现了由动态传感器数据至结构疲劳寿命的数据自动处理流程。
3. 以伸缩臂起重机作为工程案例,基于大量的实测数据验证了所提出方法的可行性。
文章作者简介

宋学官 大连理工大学机械工程学院重大装备设计研究所所长
长期从事多学科优化设计、工业大数据挖掘、装备智能化和数字孪生研究。
发表SCI论文80余篇,ESI高被引2篇,出版著作《ANSYS流固耦合分析与工程实例》,英文书章2个,论文总引用2800余次,H-因子28。获2009年国家优秀留学生奖、2020年机械工业联合会科技进步特等奖、2020/2021年山西省科技进步二等奖,2010年ASME PVP会议论文奖、2016年可靠性国际会议论文最佳论文奖等学术论文奖10余项。
兼任中国工程机械学会特大型工程运输车辆分会副理事长、中国图学学会产品信息建模委员会副主任委员。主持国家重点研发计划项目课题、自然基金青年/面上项目,与太重、三一、大重、国机集团、核动力设计院、中物院等合作项目10余项。
摘要
As a virtual representation of a specific physical asset, the digital twin has great potential for realizing the life cycle maintenance management of a dynamic system. Nevertheless, the dynamic stress concentration is generated since the state of the dynamic system changes over time. This generation of dynamic stress concentration has hindered the exploitation of the digital twin to reflect the dynamic behaviors of systems in practical engineering applications. In this context, this paper is interested in achieving real-time performance prediction of dynamic systems by developing a new digital twin framework that includes simulation data, measuring data, multi-level fusion modeling (M-LFM), visualization techniques, and fatigue analysis. To leverage its capacity, the M-LFM method combines the advantages of different surrogate models and integrates simulation and measured data, which can improve the prediction accuracy of dynamic stress concentration. A telescopic boom crane is used as an example to verify the proposed framework for stress prediction and fatigue analysis of the complex dynamic system. The results show that the M-LFM method has better performance in the computational efficiency and calculation accuracy of the stress prediction compared with the polynomial response surface method and the kriging method. In other words, the proposed framework can leverage the advantages of digital twins in a dynamic system: damage monitoring, safety assessment, and other aspects and then promote the development of digital twins in industrial fields.
往期推荐
热点聚焦 | FME期刊 “高被引论文” 推荐
管道机器人微型化趋势凸显,小身材也能有大用处
综述文章 | 北航丁希仑教授关于仿生可逆附着在机器人领域的应用
梅雪松教授【基于先进可重构激光加工系统的航空发动机叶片陶瓷型芯分区分层修型方法】
综述文章 | 低温微量润滑加工:从机理到应用
专家观点 | 史铁林教授关于『数字孪生技术』的分析解读

《前沿》系列英文学术期刊
由教育部主管、高等教育出版社主办的《前沿》(Frontiers)系列英文学术期刊,于2006年正式创刊,以网络版和印刷版向全球发行。系列期刊包括基础科学、
、工程技术和人文社会科学四个主题,是我国覆盖学科最广泛的英文学术期刊群,其中13种被SCI收录,其他也被A&HCI、Ei、MEDLINE或相应学科国际权威检索系统收录,具有一定的国际学术影响力。系列期刊采用在线优先出版方式,保证文章以最快速度发表。
中国学术前沿期刊网
http://journal.hep.com.cn

特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






