经典国产动画片《黑猫警长》的第一集“痛击搬仓鼠”中,曾出现这样一幕:粮食仓库被盗,前来抓鼠贼的猫警官,把鼩鼱错认成老鼠,误会了只是在地缝里捉虫吃的鼩鼱一家。后来才发现,鼩鼱虽形似老鼠,但实属食虫目,和啮齿目动物的老鼠并不是“一家人”。
这一集中还突出刻画了鼩鼱独特的行为习性:集体行动时,妈妈领头,幼崽依次衔住前方成员的尾巴,连成一串。
鼩鼱这一“咬尾成串”的特征,也为专门做昆虫仿生机器人的科研团队带来了灵感。近日,电子科技大学副教授吴一川团队设计研发了一款与鼩鼱大小相近的微型机器人,它们同样可“咬尾”相连,亦能快速分离,以实现轻松越障、功能集成和协同作战,未来有望在紧急救援、管网检测等扮演“微型特工队”的角色。
相关成果2月7日发表在期刊《设备》上。
《黑猫警长》里的鼩鼱一家。图源《黑猫警长》
最大集成“轻装”上阵
吴一川团队的主要研究方向是昆虫尺度仿生机器人,设计灵感往往来源于自然界中能进行高效协作,或拥有特殊“技能”的生物。
“我们曾受蚂蚁相互协作,搬运食物的启发,想做一类与其形似,且可以在狭小空间里集群协作的机器人。”吴一川回忆,但由于蚂蚁体型过小、制作困难,团队只得寻找更合适的仿生模型。
这时,一种名为鼩鼱的小型哺乳动物进入了研究视野。鼩鼱身体呈纺锤形,吻部细长,体长只有50-62毫米,与团队预设的机器人尺寸基本吻合。
据了解,此次设计的单个机器人长度为4厘米,重量仅6克,主体部分不过一枚一元硬币大小。狭小机身内,团队集成了振动电机、控制电路、无线通信模块、微型电池、磁铁、加热线圈及胶腔等多个组件,尽量做到功能、重量与尺寸的平衡。
其中,电子“鼩鼱”的运动系统摒弃了传统的旋转电机,转而采用振动电机驱动。因为前者会占用过多空间,使整体显得“笨重”,后者则更为精简轻便。
“电机振动时会带动下方的不锈钢‘腿’,从而带动机器人‘行走’。”团队成员陆国彬介绍,启动左电机时机体向右转动,启动右电机时向左转动,双电机同时工作则向前直线运动。在实际测试中,机器人直线速度可达16厘米/秒,旋转速度可达每秒一圈(360度)。
尽管目前该电子“鼩鼱”仍处于实验室研究阶段,但应用前景较为广阔。吴一川预想,在未来应急救援或城市管网检测中,仿鼩鼱可携带相应的探测设备,进入人员难以触及的狭小空间,扮演“微型侦察队”或精准救援的角色。
电子鼩鼱机器人。受访者供图
“咬尾”成串更好越障
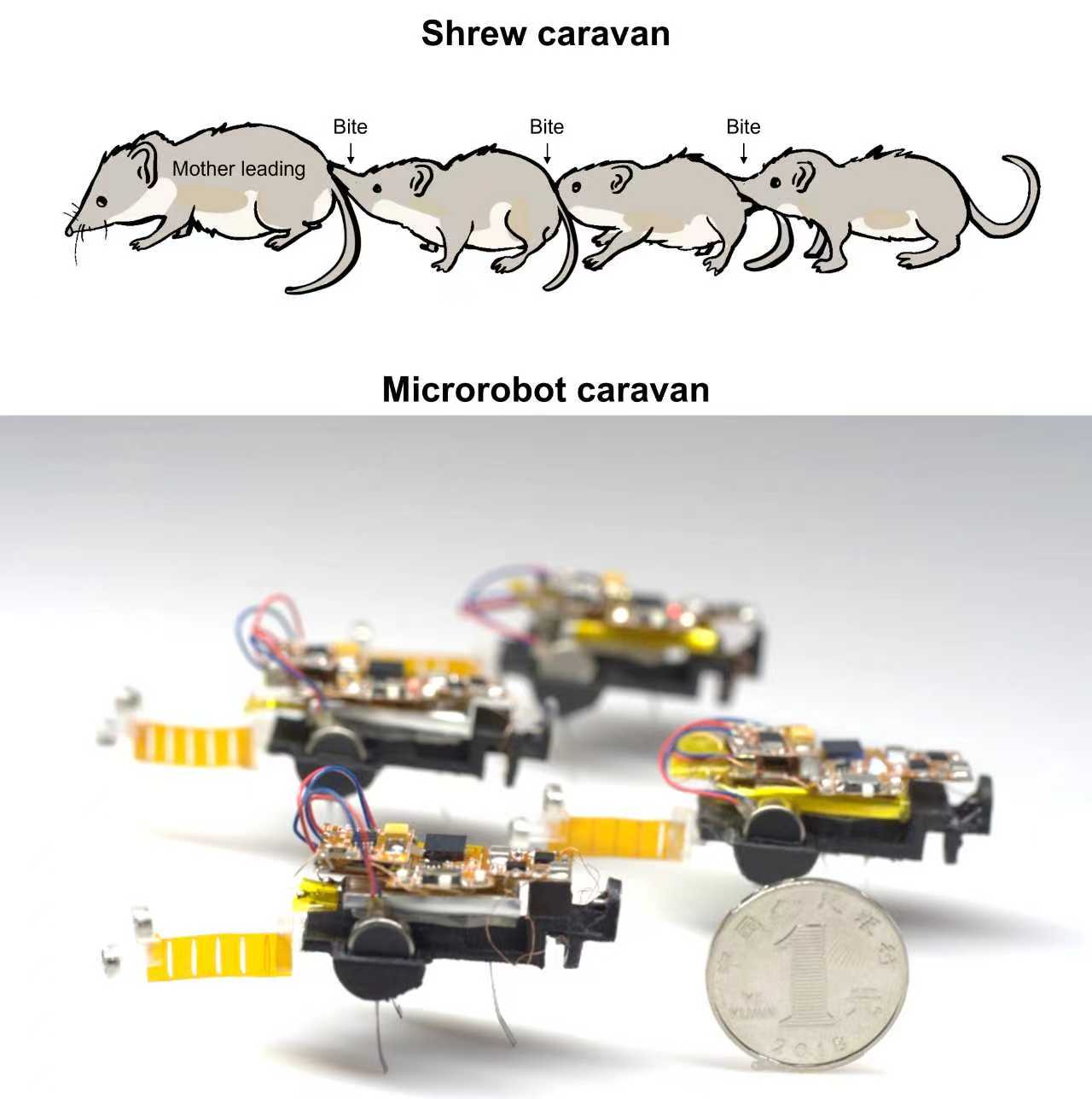
鼩鼱群体在集体移动时展现出独特的“咬尾成串”行为,更为团队设计“可重构、可协作”的微型机器人带来重要启发。
鼩鼱视力不好,它们会一个接一个咬住前面伙伴的尾巴,连成“小火车”以在复杂的环境中安全行动。
“同样地,单个微型机器人能力有限,在复杂地形中容易被障碍卡住。如果多个机器人首尾相连时,整体长度增加,可跨越比单机长度更宽的沟壑。”团队成员彭毅解释,不同电子“鼩鼱”未来还可分别携带摄像头、温度传感器、声音探测器等设备,当整体移动至目标区域后,又能分开进行各自的探测任务。
为了实现机器人之间可靠且可控的连接与分离,团队设计动用了不少巧思。每个机器人的“嘴巴”装有两枚磁体,与其对应的“尾巴”设有两个电磁线圈。当两个机器人靠近时,前面机器人的电磁线圈和后方机器人的磁体会快速对准并吸附。
“但仅靠磁力吸附强度不足,尤其是在越障或负载时容易脱落。”吴一川表示,为此团队在连接界面加入了热响应型粘合胶。“该胶体在常温下为固态,通电加热后融化为液态,冷却后重新固化。”
这样一来,两只电子“鼩鼱”之间先通过磁力对齐,再加热其中一个线圈使附着的胶体融化,待冷却后便加固了粘结。分离时,再次加热使胶体软化,同时另一线圈产生反向磁场,使得连接的两端轻松脱开。这一机制使得机器人群体既能快速组队,又能随时分开作业,还可灵活按需重组,适应不同任务场景。
目前,机器人的连接、分离与运动仍需通过手机APP进行远程控制,因此智能化自主协作仍是未来的重点发展方向。同时,团队也将持续从自然界里的小动物“取经”,研究蟑螂、蜘蛛以及蝴蝶的运动机制,探索更多灵活轻便且功能多元的微型仿生机器人。
相关论文信息:https://doi.org/10.1016/j.device.2025.101045
版权声明:凡本网注明“来源:中国科学报、科学网、科学新闻杂志”的所有作品,网站转载,请在正文上方注明来源和作者,且不得对内容作实质性改动;微信公众号、头条号等新媒体平台,转载请联系授权。邮箱:shouquan@stimes.cn。