|
|
| “胶囊医生”有望代替肠镜检查 |
| 天津大学提出新型活检胶囊机器人采样策略 |
日前,天津大学机械工程学院副教授宋智斌团队提出胶囊机器人活检采样新策略。他们研发的新型活检胶囊机器人能够高速切割结肠内可疑病变组织,避免现有活检方式存在的组织撕裂等问题。相关成果已发表在中国科技期刊卓越行动计划高起点新刊《机器人和仿生系统》。
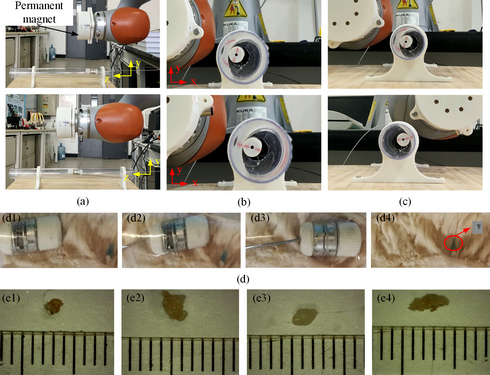
新型活检胶囊机器人运动及活检示意图。天津大学供图
在人体消化道疾病中,结直肠癌是一个直接威胁人体健康的隐形杀手。结肠镜检查是结直肠癌诊断的“金标准”,它可以让医生直观地看到结直肠里的病灶,并取活检获得病理诊断。传统结肠镜会给患者带来不适感,胶囊内窥镜作为一种内镜诊断方法,可以降低使用者的不适程度,拥有广泛前景。然而,目前临床使用的胶囊内窥镜无法进行活检采样,学界提出了多种胶囊内窥镜活检策略,但在获取肠道组织时易造成撕裂和粘连等问题。
“胶囊内窥镜也称胶囊机器人,利用胶囊机器人进行肠胃、食道等部位的检查,不仅能提供图像信息,还能进行活检操作,是未来消化道疾病筛查的主要发展方向。”宋智斌说,他带领团队提出了“为活检胶囊机器人安装高速旋转刀片”的活检采样新策略,还为这款安装高速旋转刀片的胶囊机器人安装了一个小小的永磁体,通过外部磁场来控制其运动。高速旋转刀片则由一个旋紧的螺旋弹簧激活,这种螺旋弹簧可以提供比马达或同等质量的磁铁更强劲的瞬时动力,同时可以有效避免运动控制和活检操控之间的相互干扰。同时,团队还设计了触发机构以保证可靠的采样。根据离体猪大肠活检取样验证结果显示:新型活检胶囊机器人可以实现多次活检触发,并且当其高于一定切割速度可有效避免软组织撕裂,有望成为未来临床胃肠检查的全新手段。
“这项研究成果可实现一次检查、多次活检的功能,为未来具有活检功能的胶囊机器人临床应用提供了技术支持。”宋智斌表示,“这会进一步提高胃肠疾病诊疗水平,也是胶囊机器人未来的发展方向。”
相关论文链接:https://doi.org/10.34133/2022/9783517
版权声明:凡本网注明“来源:中国科学报、科学网、科学新闻杂志”的所有作品,网站转载,请在正文上方注明来源和作者,且不得对内容作实质性改动;微信公众号、头条号等新媒体平台,转载请联系授权。邮箱:shouquan@stimes.cn。







