论文标题:Data-driven friction modeling and compensation for rotary servo actuators
期刊: Frontiers of Mechanical Engineering
作者:Baoyu LI, Xin XIE, Bin YU, Yuwen LIAO, Dapeng FAN
发表时间:06 Jun 2024
DOI:10.1007/s11465-024-0812-4
微信链接:点击此处阅读微信文章
近日,国防科技大学范大鹏、谢馨研究团队在《Frontiers of Mechanical Engineering》发表了题为“Data-driven friction modeling and compensation for rotary servo actuators”的研究型论文。研究提出了一种数据驱动的摩擦建模与补偿方法,旨在解决旋转型伺服作动器中摩擦引起的伺服性能下降问题。
研究背景
伺服作动器因其高精度、高动态、高可靠性等特点,被广泛应用于航空航天、武器、机器人系统和制造等领域。目前,随着对伺服系统控制精度和动态性能的要求越来越高,伺服作动器传动性能的优化和伺服控制方法的创新已成为关键的研究领域。在低速和低频往复运动条件下,速度模式下的运动精度是旋转型伺服作动器的关键评估指标。摩擦是影响这些评价指标的主要因素,也是制约伺服系统控制精度、工作带宽和可靠性进一步提高的关键因素。然而,由于现有摩擦模型在低速下的精度较低且缺乏位置相关性,实现最佳的摩擦补偿效果仍然具有挑战性。因此,迫切需要提高摩擦模型的精度,以实现伺服作动器的高精度控制。
文章亮点
(1)创新的数据驱动摩擦模型
为了解决传统摩擦模型精度偏低的问题以及数据驱动方法在捕获零速度摩擦方面的局限性,文章引入了一种基于PINN和LuGre模型的数据驱动建模方法,并将摩擦模型的自变量扩展到速度和位置两个维度上。通过结合LuGre模型和人工神经网络的优势,数据驱动摩擦模型确保了建模过程中的快速收敛,并显著提高了其整体准确性。
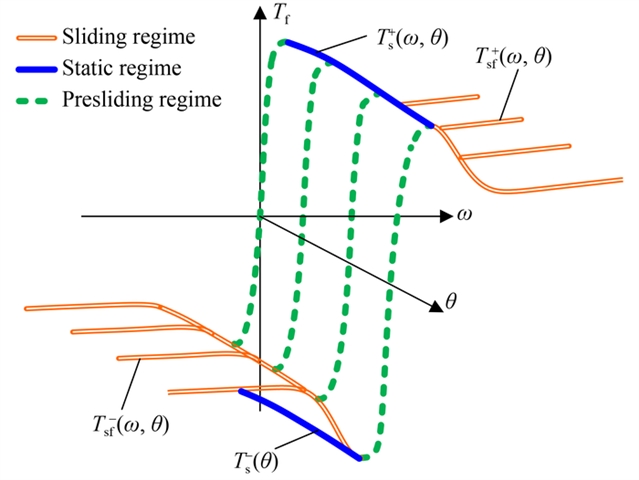
图1 数据驱动的摩擦模型
(2)摩擦复合补偿方法
为了提高伺服作动器在内外多重扰动下的伺服性能,在建立的数据驱动摩擦模型的基础上,文章提出了一种以摩擦补偿为核心的复合补偿方法,并根据系统的速度和位置计算摩擦补偿扭矩。通过实验验证,与三种传统控制方法相比,所提出的摩擦复合补偿方法在不同角位置保持一致精度的同时,速度跟踪精度分别平均提高了49.5%、30.4%和32.7%。进一步验证了数据驱动摩擦模型的准确性,证明了所提控制方法优越的抗扰能力。
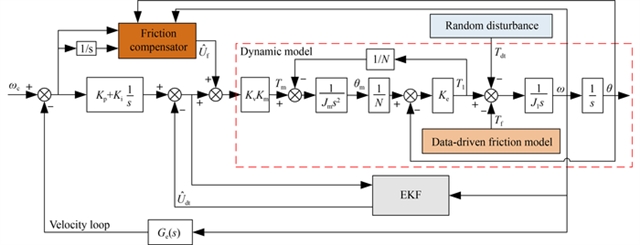
图2 摩擦复合补偿方法框图
引用:
Baoyu LI(李宝宇), Xin XIE(谢馨), Bin YU(于滨), Yuwen LIAO(廖宇文), Dapeng FAN(范大鹏). Data-driven friction modeling and compensation for rotary servo actuators. Front. Mech. Eng. 2024, 19(6): 41
https://doi.org/10.1007/s11465-024-0812-4

扫描二维码阅读全文
精彩推荐
1. 综述文章 | 超精密加工与3D打印:现状、机遇和未来展望
2. Research Article | 基于多目标优化的航空发动机管路敷设方法研究
3. 2024年度精彩盘点 | FME
4. 我们的2024 | FME期刊封面故事精彩回顾
5. FME期刊内容摘要 | 2024年第六期 (Dec. 2024, Volume 19 Issue 6)

特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






