
光学智能制造是先进制造、精密控制、材料和人工智能等多学科的集成,其中引入精密控制的机器人系统能够显著提高光学加工性能。然而,面对复杂工况下光学制造对精确运动传递的需求,现有方法很难解决实际加工环境操作对象位置不确定条件下的高一致性运动复制,以及频繁运动空间切换条件下的精确操作力感知和控制。
鉴于此,中国科学院长春光学精密机械与物理研究所田大鹏研究员团队提出了一种基于符号序列相位切换控制的运动复制方法。该方法将专家操作的位置-力运动特征进行保存、分解、符号化和再现。实验证明该方法在操作对象不确定的条件下能够实现高一致性和适应性的专家技能学习与再现。该方法有望进一步提高光学智能制造过程的加工性能
该成果以“Motion-copying method with symbol sequence-based phase switch control for intelligent optical manufacturing”为题,发表在Light: Advanced Manufacturing。中国科学院长春光学精密机械与物理研究所、动态光学成像与测量全国重点实验室王昱棠副研究员为论文第一作者,田大鹏研究员为通讯作者。
智能光学制造是先进制造、精密控制、材料和人工智能等多学科集成。然而,随着光学元件的形式发展到空间不对称的多自由度复杂曲面,加工精度发展到纳米级甚至更高,实现高度一致性精细光学制造的难度显著增加。机器人运动控制的引入能够显著提高加工性能,但是如何在复杂工况下将工人的操作特征有效传递给机械仍然是一个难题。考虑到复杂光学制造对精确运动传递的要求,现有方法很难解决存在操作对象位置不确定性前提下的高一致性运动复制和频繁运动空间切换条件下精确的力传感和运动控制。
鉴于此,研究人员提出一种基于符号序列相位切换控制(symbol sequence-based phase switch control)的运动复制方法,如图1所示。该方法分为运动保存和运动再现两个阶段。
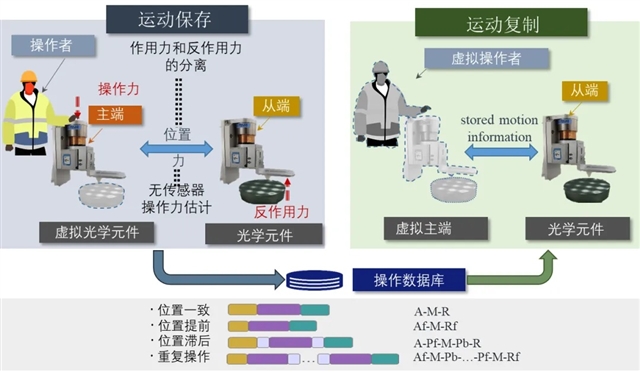
图1:基于符号序列相位切换控制的运动复制方法示意图
运动保存阶段,操作者操作主端,基于遥操作双边控制策略控制从端完成对光学元件的加工。整个操作过程的位置和力信息在主端与从端之间得到有效传递,保证了遥操作过程的透明性。同时提出了一种自适应滑模辅助反作用力观测器,在无传感器的前提下提高了主从两端反作用力估计准确性和带宽。操作结束后,将操作者主端的位置-力运动信息保存在操作数据库中,并将其运动特征进行特征分解和符号化。
运动再现阶段,操作数据库中存储的数据被当作虚拟操作者,适应性地根据操作对象的位置调整操作序列,高一致性地再现存储的操作。
实验验证,该方法在操作对象位置一致、位置提前、位置滞后三种条件下的操作一致性均优于98%,实现高一致性和适应性的专家技能学习与再现。(来源:先进制造微信公众号)
相关论文信息:https://doi.org/10.37188/lam.2024.012
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






