继螺丝粉机器人后,北卡罗莱纳州立大学机械航空系副教授尹杰团队最近研发出一种能像轮胎一样滚动、像陀螺一样旋转、像卫星一样绕轨道运行的新型软体机器人。1月8日,该研究论文发表在《美国国家科学院院刊》(PNAS)上。
“我们这款软体机器人由带状液晶弹性体制成,像麻花一样扭曲,把两端粘在一起,形成了一个类似手镯的圆环。当它被放置在55摄氏度的表面上时,就会自主的产生滚动,表面温度越高,机器人滚动的速度就越快。”论文通讯作者尹杰在接受《中国科学报》采访时介绍。
有趣的是,该机器人能产生三种运动:第一种是从里往外翻转;第二种是能沿着自己的圆心开始自转;第三种是围着环外的一个点去转动,就像行星公转一样。
这项研究的一大亮点是动力来源不同。这款软体机器人是由物理智能控制行为,这意味着它们的行为是由其结构设计和材料决定的,而不是由计算机或人类干预来决定。
“它们能从环境中捕捉热能,然后把这些热能转化为机械能,也就是说它们不需要电池就能运动。”尹杰说。
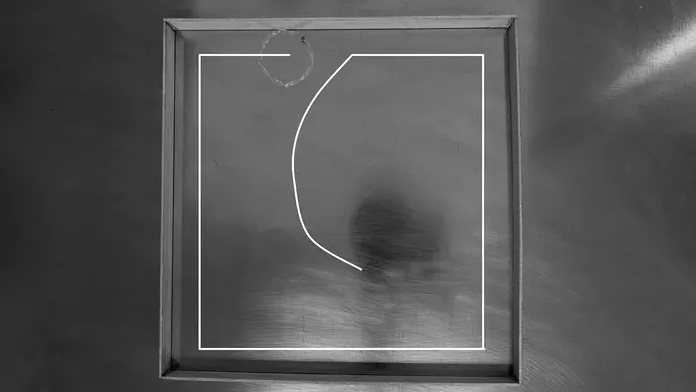
“我们观察到这款软体机器人可以像蚂蚁一样贴着物体的边缘走,通过实验发现,无论它被放入到正方形还是三角形的空间里,它都能够找到边缘,并沿着边缘开始运动,绘制出空间的轮廓。它还可以识别边缘上的缺口或损坏。”论文第一作者、北卡罗莱纳州立大学机械航空系博士生漆方杰在接受《中国科学报》采访时说。
图中展示了机器人能绘制出空间的轮廓。 受访者供图
“这种功能对于帮助我们导航或绘制未知环境的地图非常有用。而且由于体软、耐热等特性,它可以替代硬型机器人到很热的环境中执行‘任务’。”漆方杰指出。(来源:中国科学报 张晴丹)
相关论文信息:https://doi.org/10.1073/pnas.2312680121