美国科学家研制了一个绰号为“Morphobot”(M4)的机器人,能通过轮子、螺旋桨、腿部和手部间的附件,在陆地上的各种地形和空中移动。相关研究6月27日发表于《自然—通讯》。
一些动物能调整它们的肢体用途,应对不同的地形。比如,海狮能用鳍状肢在地上行走,狐獴靠后肢站立来侦察周围环境,石鸡能在翅膀的帮助下用四肢攀爬陡坡。通过模拟动物改变四肢用途的能力,拥有多功能肢体的移动机器人能调整移动策略来穿越复杂地形。
在动物的启发下,东北大学的Alireza Ramezani和同事设计出了M4 ,它重6千克、长70厘米、高35厘米、宽35厘米。该机器人有四条腿,每条腿有两个关节,腿末端还有固定的涵道风扇。涵道风扇的功能可在腿、螺旋桨推进器或轮子之间切换。M4能适应在崎岖地面上行走,攀越陡坡,滚过大型障碍物,在高处飞行,以及在低矮通道匍匐前进。
“我们的机器人受到禽类、狐獴、海豹这类动物的启发,能通过不同运动模式探索周围环境,包括飞行、旋转、爬行、匍匐、平衡和翻滚。”Ramezani说,研究或有助于设计出能穿越各类环境的机器人,如用于自然灾害搜救、太空探索和自动包裹递送的机器人。
作者表示,研究结果证明了设计有多功能附肢机器人的优势,这类机器人可穿越各种有挑战的不同地形。(来源:中国科学报 冯丽妃)
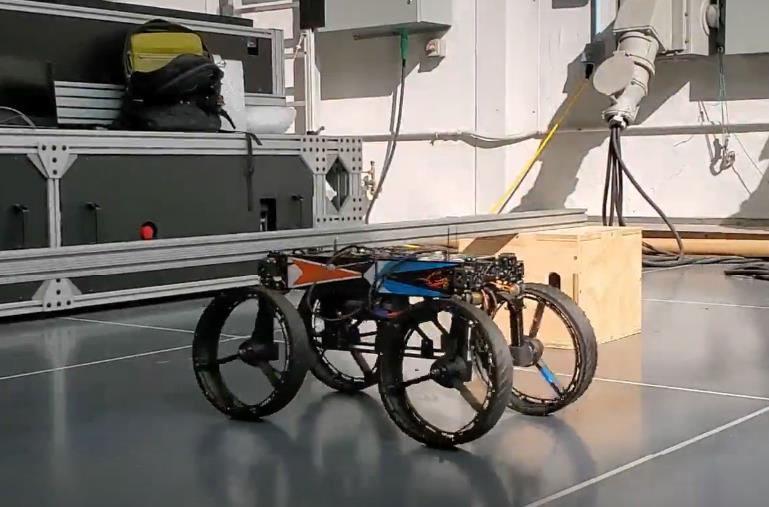
变形机器人 图片来自:Ramezani
变形机器人拥有出色的平衡能力。图片来自:Ramezani
变身飞行机器人图片来自:Ramezani
户外飞行测试图片来自:Ramezani
相关论文信息:https://doi.org/10.1038/s41467-023-39018-y