|
|
|
|
|
FME | 前沿研究:管道机器人微型化趋势凸显,小身材也能有大用处 |
|
|
论文标题:A piezoelectric inertial robot for operating in small pipelines based on stick-slip mechanism:modelling and experiment(管道机器人微型化趋势凸显,小身材也能有大用处)
期刊: Frontiers of Mechanical Engineering
作者:Jichun XING(邢继春),Chao NING(宁超),Yingxiang LIU(刘英想),Ian HOWARD
发表时间:03 Nov 2022
DOI:10.1007/s11465-022-0697-z
微信链接:点击此处阅读微信文章
面向微小管道操作的压电黏滑驱动机制
管道机器人:建模与实验
A piezoelectric inertial robot for operating in small pipelines based on stick-slip mechanism:
modelling and experiment
作 者 列 表
Jichun XING(邢继春)Chao NING(宁超)Yingxiang LIU(刘英想)
Ian HOWARD
关 键 词
pipeline robot, piezoelectric, inertial drive, stick-slip, large load capacity, dynamics model
管道机器人,压电,惯性驱动,黏滑,大负载,动力学模型, 微小管道
原 文 链 接
https://journal.hep.com.cn/fme/EN/10.1007/s11465-022-0697-z
文章简介
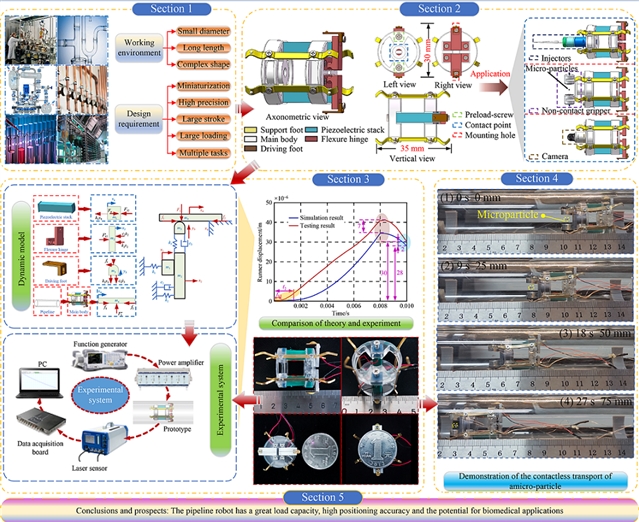
在工业和生物医学领域存在大量的细小管道,对这类微小管道进行检测、维护或在管道内部进行精细操作的需要日益凸显,也对微小管道机器人的设计提出了更高的要求。面向微小管道操作的机器人需要具有小型化、高定位精度、大行程、可装配执行器等能力。针对这些设计要求,本文提出了一种面向微小管道操作的压电惯性黏滑驱动机理的管道机器人,分析了该机器人的黏滑驱动机理,设计了可携带多种执行装置的轻量化管道机器人。将LuGre摩擦模型与驱动系统动力学模型相结合,建立了可描述该驱动系统黏滑机制的动力学方程,分析了系统参数对驱动足运行轨迹的影响。搭建了试验平台,对该管道机器人的动态输出特性进行了测试并与数值仿真结果进行比较,实验结果表明,所提出的粘滑驱动的管道机器人具有可负荷自身质量4.6倍(70 g)的能力,较高的定位精度,最小步距为4 μm,可实现双向运动,其速度分别为3.5 mm/s和3 mm/s。通过安装声悬浮夹持机械手,展示了该管道机器人在微小管道进行无接触运输微小颗粒能力和潜在的应用价值。
文章亮点
1.利用压电惯性黏滑机制,设计了一种面向微小管道操作的管道机器人,可实现管道内高精度双向运动与定位。
2.结构设计中,采用镂空主体结构,实现了管道机器人的轻量化,并可安装多种精细操作执行装置进行管内作业。
3.针对所提出管道机器人系统,建立了考虑LuGre摩擦模型的离散系统动力学方程。
4.该管道机器人同时兼具了体积小、大负载的优点,最大可承受自身质量的4.6倍(70 g)负载,并且在50 g负载下,速度仍保持无负载速度的60%。
文章作者简介
邢继春(通讯作者)男,工学博士,燕山大学机械工程学院副教授、博士生导师。中国机械工程学会高级会员、IEEE会员。主要研究领域:压电驱动理论与控制,微型机器人,压电能量收集。承担国家自然基金及河北省自然科学基金等5项,参与国家重点研发计划及国家自然科学基金等3项,曾在国内外高水平期刊杂志中发表过40余篇,其中SCI、EI收录论文30余篇,获得国家授权发明专利20余项。
刘英想(通讯作者)男,工学博士,哈尔滨工业大学教授,博士生导师,全国优秀博士论文获得者,国家自然科学基金优秀青年科学基金获得者,哈尔滨工业大学青年科学家工作室负责人,机器人技术与系统国家重点实验室骨干成员。
主要研究方向为压电驱动理论与技术、机器人理论与技术;出版专著1部、发表学术论文200余篇(IEEE汇刊论文近50篇)、获得国家授权发明专利120余项;主持国家自然科学基金等各类课题20余项;曾获黑龙江省科学技术奖(自然科学类二等)1项、黑龙江省高校科学技术一等奖(自然科学奖)1项、黑龙江省技术发明二等奖1项、第二届上银优博铜奖、第四届中华优秀出版物图书提名奖、国际会议论文奖及国内优秀论文奖共6项。任国际期刊IEEE Transactions on Industrial Electronics、IEEE Transactions on Robotics和IEEE Access编委(Associate Editor),国际期刊Materials编委(Topic Editor),国际期刊Applied Sciences、Materials和Actuators特邀编辑(Guest Editor),《振动工程学报》青年编委;是中国机械工程学会高级会员、IEEE Senior Member、中国机械工程学会机器人分会第一届委员会委员、中国人工智能学会智能机器人专业委员会委员。
摘要
Small pipes exist in industrial and biomedical fields, and require microrobots with high operational precision and large load capacity to inspect or perform functional tasks. A piezoelectric inertial pipeline robot using a “stick-slip” mechanism was proposed to address this requirement. In this study, the driving principle of the proposed robot was analyzed, and the strategy of the design scheme was presented. A dynamics model of the stick-slip system was established by combining the dynamics model of the driving foot system and the LuGre friction model, and the simulation analysis of the effect of system parameters on the operating trajectory was performed. An experimental system was established to examine the output characteristics of the proposed robot. Experimental results show that the proposed pipeline robot with inertial stick-slip mechanism has a great load capacity of carrying 4.6 times (70 g) its own mass and high positioning accuracy. The speed of the pipeline robot can reach up to 3.5 mm/s (3 mm/s) in the forward (backward) direction, with a minimum step distance of 4 μm. Its potential application for fine operation in the pipe is exhibited by a demonstration of contactless transport.
往期推荐
综述文章 | 北航丁希仑教授关于仿生可逆附着在机器人领域的应用
梅雪松教授【基于先进可重构激光加工系统的航空发动机叶片陶瓷型芯分区分层修型方法】
综述文章 | 低温微量润滑加工:从机理到应用
专家观点 | 史铁林教授关于『数字孪生技术』的分析解读

《前沿》系列英文学术期刊
由教育部主管、高等教育出版社主办的《前沿》(Frontiers)系列英文学术期刊,于2006年正式创刊,以网络版和印刷版向全球发行。系列期刊包括基础科学、
、工程技术和人文社会科学四个主题,是我国覆盖学科最广泛的英文学术期刊群,其中13种被SCI收录,其他也被A&HCI、Ei、MEDLINE或相应学科国际权威检索系统收录,具有一定的国际学术影响力。系列期刊采用在线优先出版方式,保证文章以最快速度发表。
中国学术前沿期刊网
http://journal.hep.com.cn

特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






