沙特阿拉伯的科学家开发出了一种微型“抓球机”。当暴露于化学蒸汽环境下时,它能捡起和放下一个弹珠大小的球。这种新技术可以使软致动器(机器中使机器移动的部件)在不需要额外昂贵材料的情况下,执行多种任务。相关研究近日发表于《化学》期刊。
现有的软致动器只局限于一种类型的运动,但这种新型复合薄膜可以根据所接触的蒸汽的不同,以不同的方式扭曲自身。“它可以根据分子相互作用而弯曲和拉伸,这在这个尺寸范围内是非常复杂的。”论文作者、阿卜杜拉国王科技大学的化学教授Niveen M. Khashab说。
研究者希望将该发现用于开发能够在各种环境中进行精确和适应性运动的先进软体机器人系统,如医疗设备、工业自动化以及测量温度、空气质量和湿度等方面。
为了测试该机器执行多项任务的能力,研究者首先将其暴露在丙酮中,此时该装置能抓住一个红色棉球,并伸展把球扔进一个盒子里。当团队将机器暴露在乙醇蒸汽中时,它能抓住棉球并将其从盒子中取出。
与硬机器人中的刚性致动器不同(可能是由金属或坚韧的塑料制成的),软致动器是灵活的,使得它们能够执行一系列硬机器人无法执行的任务。因此,软致动器已成为精密农业、深海勘探和可穿戴设备等尖端应用的首选技术。
但软致动器仍然是有限的——它们可以弯曲、扭曲或拉伸,但不能以多种方式移动,这使得它们无法执行更复杂的任务,而这些任务将使它们具有更广泛的用途。虽然研究人员正努力使设备的运动范围更大,但其中许多策略都涉及到不同材料的组合,这使得它们成本高昂、制造难度大,同时增加了机械故障的风险。
为了克服这一挑战,Khashab和同事们开发了一种由聚合物基质制成的机械爪,这种聚合物基质包含有机化合物尿素的分子笼。研究人员选择尿素作为笼子,因为这种化合物可以形成多个氢键,当尿素分子暴露在不同的蒸汽分子中时,它们可以快速重新配置。因此,可以精确控制材料的属性,使其易于改变。
研究结果表明,通过控制蒸汽刺激的类型和浓度,相关材料可以“有效地编程,以实现复杂的运动”。
“这项研究最引人注目的发现是独特的驱动行为,即软驱动器执行复杂的运动,包括弯曲、拉伸和恢复,在以前没有报道过。”Khashab说。
下一步,研究人员计划研究机械爪的能量密度,以及转换能量效率,从而提高其性能。Khashab说,他们还将测试当软驱动器与产生电荷的材料结合时产生电信号的能力,最终目标是开发柔性可穿戴电子设备。
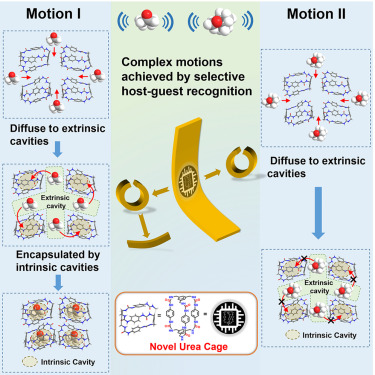
研究者利用主客体化学工具在软执行器中实现复杂的机械运动。图片来自作者
相关论文信息:
http://doi.org/10.1016/j.chempr.2024.06.016
版权声明:凡本网注明“来源:中国科学报、科学网、科学新闻杂志”的所有作品,网站转载,请在正文上方注明来源和作者,且不得对内容作实质性改动;微信公众号、头条号等新媒体平台,转载请联系授权。邮箱:shouquan@stimes.cn。






