近日,大连海事大学彭周华教授团队针对水动力参数未知、风浪流干扰未知、动静态碍航物约束下的智能船舶系统,提出了一种智能船舶安全平行轨迹跟踪控制结构,包括实时运动数字孪生建模和平行自学习抗干扰轨迹跟踪控制器。相关成果发表在《IEEE Transactions on Intelligent Vehicles》。
全球智能船舶研究正处于快速发展和博弈竞争阶段。智能船舶是典型集计算、通信、控制为一体的复杂多维信息物理系统,发展基于信息物理系统的智能船舶控制技术是新一代航运体系构建的重要组成部分。数字孪生和平行控制为智能船舶信息空间与物理空间融合与交互提供了全新思路,同时为智能船舶建模、决策、控制提供了新的研究范式。然而相关理论方法极其有限,迫切需要开展前瞻性理论技术探索。
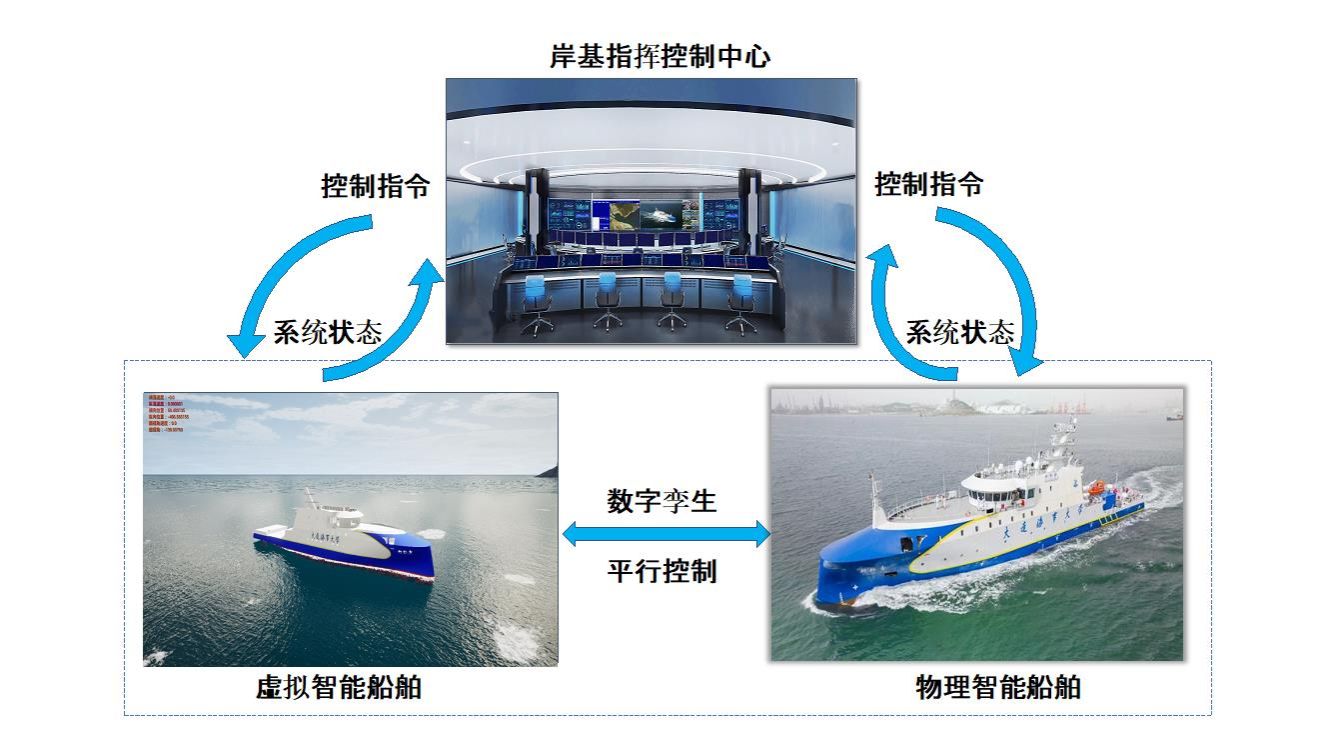
智能船舶系统。大连海事大学供图
团队首先提出了实时智能预估器,实现了船舶运动状态在信息空间的精确表征和模型在线演化,为智能船舶平行控制提供了精确模型信息和扰动信息。其次,他们设计了基于虚拟船舶系统的平行自学习抗干扰轨迹跟踪动态控制律,实现了物理船舶系统和虚拟船舶系统的同步轨迹跟踪,保证了闭环航迹跟踪控制系统的稳定性、抗扰性、适应性。随后,为满足系统输入约束和安全约束,构造了基于积分控制障碍函数的安全平行轨迹跟踪动态控制律,保证了动静态碍航物约束下智能船舶自主航行过程中的安全性。最后,以大连港自主靠泊作业为任务场景,验证了所提智能船舶运动数字孪生建模和平行控制方法的有效性。
该研究与现有基于物理方程或数据统计的船舶运动建模方式不同,将物理方程和历史数据同时融入到船舶运动数字孪生运动建模,构建了数据驱动智能预估器,实现了船舶信息空间和物理空间船舶模型信息的精确状态同步和模型在线演化,为态势推演和平行控制提供了精确的船舶模型信息和风浪流干扰信息。并且保证了航行过程中的稳定性和抗扰性,保障了船舶在复杂交通场景下航行过程中的安全性。
该新型实时运动数字孪生建模和平行控制策略为智能船舶运动控制提供了新途径,在智能船舶船岸协同、自主航行、自主靠泊、编队航行等作业场景具有重要应用前景,对于新一代绿色、智慧、安全航运系统的构建具有积极意义。
相关论文信息:https://ieeexplore.ieee.org/document/10418986
版权声明:凡本网注明“来源:中国科学报、科学网、科学新闻杂志”的所有作品,网站转载,请在正文上方注明来源和作者,且不得对内容作实质性改动;微信公众号、头条号等新媒体平台,转载请联系授权。邮箱:shouquan@stimes.cn。






